

Problemas de geometría lineal y espacio afín
Nivel: Secundaria
 y es perpendicular a la recta
y es perpendicular a la recta

 y
y  .
.
Tomamos uno de los cuatro puntos como origen, por ejemplo D. Una vez fijado el origen, los otros tres puntos definen otros tantos tres vectores,
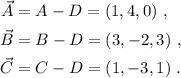
Estos tres vectores definen una matriz,

Si el rango de esta matriz es 1, entonces los cuatro puntos están alineados. Si el rango es 2, son coplanares. Si es tres, no son coplanares.
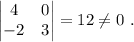
Podemos comprobar fácilmente que el rango es, como mínimo, dos considerando el menor
Nos queda únicamenmte comprobar si el rango de la matriz puede ser tres, calculando el determinante total,
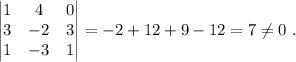
Por lo tanto, el rango de la matriz es tres, y los vectores no son coplanarios.
Dados los planos
hallar la ecuación de la recta  que pasa por el punto
que pasa por el punto  y es paralela a los dos planos.
y es paralela a los dos planos.
 respecto del plano
respecto del plano  .
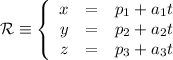
.Llamaremos R a la recta perpendicular al plano  que pasa por el punto A. De la ecuación del plano , sabemos que su vector perpendicular es (2, -1, -1), por lo que la recta R se puede escribir como
que pasa por el punto A. De la ecuación del plano , sabemos que su vector perpendicular es (2, -1, -1), por lo que la recta R se puede escribir como

El punto de intersección entre la recta R y el plano , que llamaremos  , se obtiene substituyendo los valores de
, se obtiene substituyendo los valores de  ,
,  y
y  en la ecuación del plano:
en la ecuación del plano:

simplificando,

con lo que el punto de intersección se encuentra en  . Substituyendo en (1), tenemos
. Substituyendo en (1), tenemos

El vector que une los puntos O' y A se obtiene simplemente restando,

Por simetría, el vector que une el punto con  será
será  . Por tanto,
. Por tanto,

Dados el punto  y el plano
y el plano  . El punto simétrico,
. El punto simétrico,  de
de  respecto de será el punto que cumpla
respecto de será el punto que cumpla

donde  es el punto de intersección entre el plano y la recta , perpendicular a éste y que pasa por . Matemáticamente:
es el punto de intersección entre el plano y la recta , perpendicular a éste y que pasa por . Matemáticamente:

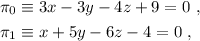
Si expresamos de forma continua

Y ahora resolvemos dos de las tres igualdades, podemos expresar como intersección de dos planos

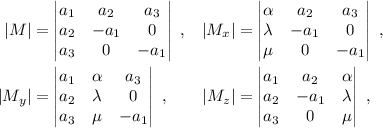
Así podemos reescribir (5.2) como  . Para calcular ahora las coordenadas de no tenemos, pues, más que resolver el siguiente sistema, que es compatible determinado:
. Para calcular ahora las coordenadas de no tenemos, pues, más que resolver el siguiente sistema, que es compatible determinado:
Donde  ,
,  y
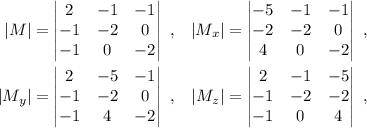
y  . Lo resolveremos mediante la REGLA DE CRAMER, por lo que:
. Lo resolveremos mediante la REGLA DE CRAMER, por lo que:
Así, tenemos que 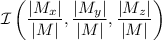 . Si ahora utilizamos este resultado en (1), obtenemos las coordenadas del punto simétrico :
. Si ahora utilizamos este resultado en (1), obtenemos las coordenadas del punto simétrico :

En partircular para el caso dado,

Por lo tanto,
Entonces tenemos que

 , proyección de la recta
, proyección de la recta
 .
.
